






设备简介
功能概述 PTD-QT521 视觉对位智能穿戴全自动真空贴合机采用视觉对位系统
结合高精度 KK 模组及三轴微动平台设计,是本公司针对智能穿戴 TP 和 LCD、TP 和
LCM 模组、G+G、硬对硬等贴合而研发的高精密设备。
工作步骤概述 设备左侧为放置 TP 工位,左侧正面为放置液晶工位。视觉对
位贴合与真空腔体压合两段组合。设备在正常运行时,通过人工或机械手将 TP 放到
左侧 TP 治具位上,由高精度模组和微动平台吸取移动到 CCD 下部取像位置抓取数据,
等待液晶放料取像,系统运算数据自动对位贴合,然后转入真空腔压合。设定工艺控
制程序,使玻璃、液晶依次按顺序加工,完成玻璃的快速对位、抽真空、压合过程,
然后机械手将压合好的模组放在输送带上。

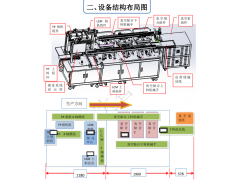
机 械 结 构 说 明
一.TP 上料组件
1.TP 上料平台治具+精密丝杆模组
2. TP 人工上料,人性化单按钮启动模式
二.①TP 移载机械手
1. TP 移载机械手+UVW 自动对位平台+精密丝杆模组
2.机械手从 TP 治具抓取产品后,相机拍照进行自动校正对位,
传送至预压贴合工位
②LCM 上料组件
1. LCM 上料平台治具
2. LCM 人工上料,双按钮启动模式,提高此工位安全系数
三.LCM 移载机械手
1. LCM 移载机械手+精密丝杆模组
2.机械手从 LCM 治具抓取产品,传送至预压贴合工位后,相机
拍照提供 TP 自动校正对位的基准数据。
四.TP+LCM 自动视觉对位相机组
1.TP 相机+光源+精密模组+LCM 相机+光源+预压平台
2、CCD 相机采用伺服模组驱动,以自动适应不同产品的尺寸;
3、针对不同产品,CCD 相机的位置根据输入产品尺寸信息自动调整;
4、CCD 相机像素:2000W;
5、二组 CCD 相机,取 TP 油墨内框长边两个直角,红外光源补光
6、二组 CCD 相机,取 LCM 长边两个直角,条形光源补光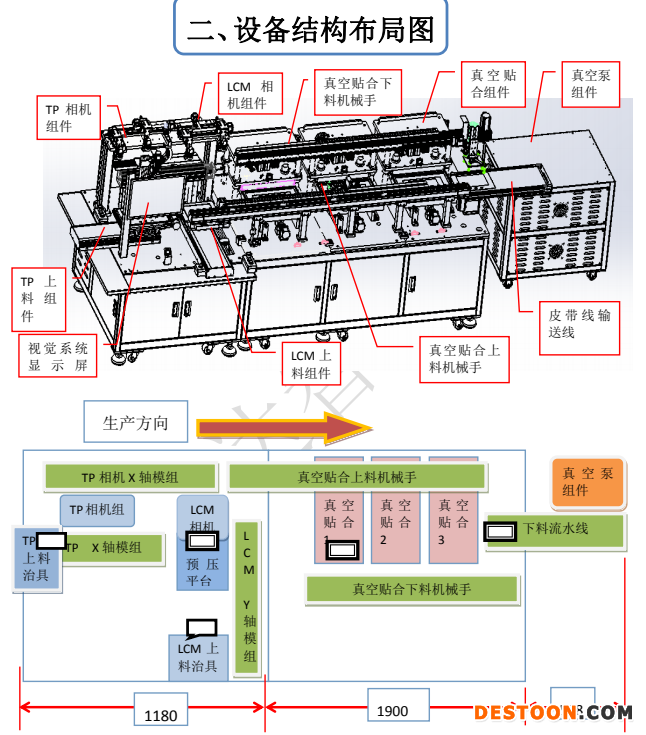
五.真空贴合上料机械手
1.机械手臂+精密同步轮模组
2.机械手臂从预压平台抓取产品,传送至真空腔体压合平台后
进行真空压合。
六. 真空贴合 下 料 机械手
1.机械手臂+精密同步轮模组
2.机械手臂从真空压合平台抓取已压合产品,传送至下料流水线,完成本工位成品下线。
规 格 参 数
1 、重量(kg): 约 1200
2 、设备外形尺寸(mm): 2760(总长,可拆分)*1200*H1700
3 、额定电压(V) :AC 220 50HZ
4、 最大功率(kW): 10
5 、贴合尺寸(mm) 智能穿戴(3 寸内) 贴合角度公差:±0.5 度
6 、最大成型尺寸(英寸): TP 3.5 寸 ; LCM 3.5 寸
7 、气源压力(MPa): 0.5~0.7
8、 环境洁净度要求 :百级洁净房(CLASS100)
9 、环境空气要求 :23+/- 5°C, 湿度 60+/- 10%
性 能 参 数
1、产品要求
TP 尺寸: min : 0.97” (X 向:15* Y 向:15)mm
min :2” (X 向:50* Y 向:55 )mm
LCM 尺寸:min:0.97”(X 向:15* Y 向:15)mm
min :2” (X 向:50* Y 向:50 )mm
2 、TP 上料 上料方式:人工上料
3、 LCM 上料 上料方式:人工上料
4、TP 与 LCM 贴合精度(mm)
X 向:±0.08 mm (以识别特征为准,排除来料误差)
Y 向:±0.08 mm (以识别特征为准,排除来料误差)
6、 成品下料 下料方式:皮带下料
7、 相机分辨率 :2000 万
8 、成型周期(s) :6
9 、真空腔体温度(℃): 30-80(可调)
10 、贴合温度控制精度(℃): ±0.5
11 、产品转型时间
1.更换新产品调校时间:≤30min(跟操作员的熟练
度有关)
2.更换已调教过的产品时,调校时间:≤5min(跟
操作员的熟练度有关)





